最新消息
2017/12/20 HDR測試的新工具——Contrast Resolution測試卡(一)
Imatest 5.0的新功能中,其中有一項是支持一款新的HDR測試卡,叫做Contrast Resolution Chart .它是為對比度的可視化和測試而設計的(在較大的亮度範圍內的低對比度物體的可見度)。這張測試卡對對於汽車和監控行業的寬動態範圍測試應用很有幫助。Imatest在IEEE P2020汽車影像標準會議上推薦了這張測試卡和測試方法。
● 攝像頭的動態範圍(攝像頭具有良好的對比度和信噪比的色調範圍)是感測器和鏡頭的重要性能(在一定程度上也是圖像信號處理性能)。現代的高動態範圍(HDR)感測器擁有令人印象深刻的動態範圍120dB(1000000:1亮度比)或更高,但是當鏡頭放在感測器前面,雜散光(在鏡頭結構內反射的雜散光)限制了系統(相機)的動態範圍,降為100dB以下。
● Flare light(耀斑)可以通過測試在白場背景上的小面積純黑區域(黑洞或光阱)進行分析,Imatest很早以前支持一種方法,可以通過灰階卡來分析Veiling glare(受Flare影響的參數)
● Veiling glare是對成像系統的耀斑的一種相關性測試,測試條件為圖像上有很多雜散光,然後測量黑色區域來分析。下圖中黑色區域為吸光材料製成的光阱,由於Flare的存在,會拍攝出右邊的圖像,黑點變亮,像起霧一樣。

耀斑/眩光的測量存在以下問題
(1 它們對黑色區域的圖像,在低對比時,特徵能見度沒有直接相關;
(2)往往誇大了耀斑的負面作用(例如,一個120dB的HDR傳感器的相機可能會得到動態範圍的測試結果只有50dB)
標準的動態範圍測量方法通常使用密度範圍大於攝影機動態範圍的穿透式圖卡進行測試。雖然它們顯示了總體的密度響應,但對於Tone Mapped Image(色調映射圖像)卻不能很好的分析,而這種圖像算法廣泛用於處理人類觀看的HDR圖像。色調映射算法選擇性地調整圖像中的色調,在有限的動態範圍內,提亮暗區以使它們可見。下圖中右側的圖像是在左側圖像基礎上,使用Matlab的Tone Mapping默認算法得到的圖像。
.png)
從上圖中的分析結果(曝光與像素級的關係)上看,經過色調映射算法處理後,灰階間的過渡連續性變差了,色塊中的中低對比度圖像信息的可見性發生了錯誤的展現。色調映射通常會破壞傳統灰階測試圖的色調響應測量。為此我們開發對比度分辨率測試圖的目的,是為了克服耀斑/眩光測試和傳統的灰階動態範圍測試的缺點。
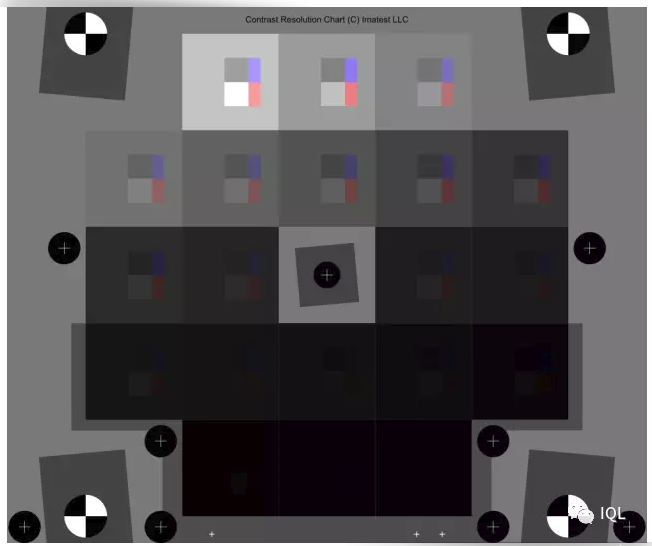
上圖是一個對比度分辨率測試圖概念圖像(與實際圖表不同,它的色調範圍太大,無法在網頁上重現)
對比度分辨率圖是由兩層8×10英寸膠片製成。該圖卡包含20個灰階,密度從OD(光密度)=基材密度+ 0.15,至基材密度+ 4.90,每一級相當於OD=0.25(如果計算從最亮到最暗的色塊,總密度範圍是5.05 OD = 101dB)。大的灰階塊被用於噪點測試,測試卡中的小色塊太小不能很好的進行噪音統計。

每個大正方形裡面(見上圖)有四個小塊:淺灰和深灰,紅色和藍色。兩個灰色塊的密度分別比背景低於和高於0.15。兩個灰色塊之間的密度差為0.30 OD(6dB),相當於2:1的對比度。淺灰和深灰色塊的平均密度與周圍背景的密度相同,以盡量減少對色調映射的影響(同樣適用於藍色/紅色色塊)。淺灰和深灰的淺色塊用於詳細的定量分析,藍色/紅色的色塊僅用於視覺評估)。
需要注意的是,最近許多 HDR圖像傳感器聲稱動態範圍為120dB到150dB)。這可能只是單獨的感測器的情況,但真正的光學成像系統,真實攝影機的動態範圍很多是達不到的。實際很多相機實測值最多達到100dB;雜散光嚴重的情況下,還會更差。
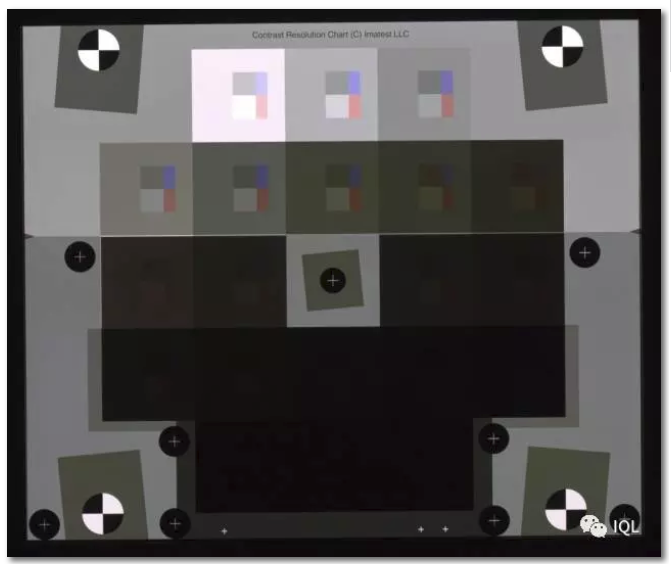
下圖是由佳能Eos-6d拍攝的圖像(全畫幅單反相機配置一個高質量的100毫米微距鏡頭,設置到ISO 100拍攝),RAW文件記錄,轉換為DNG文件(因為dcraw可能無法刪除佳能CR2文件中的黑色水平的偏移量),轉換為48位Adobe RGB的TIFF文件進行分析(沒有銳化或降噪),然後裁剪。下面的圖片是一個8位JPEG,來自非常大的48位TIFF文件。
Back